Software tutorials
Setting Up OrangePi as a Plug-and-Play MP3 Player
A very short tutorial on how to set up an OrangePi (you can use any single board computer like RaspberryPi, in fact, any computer running linux) to play a specific mp3 file on boot. It

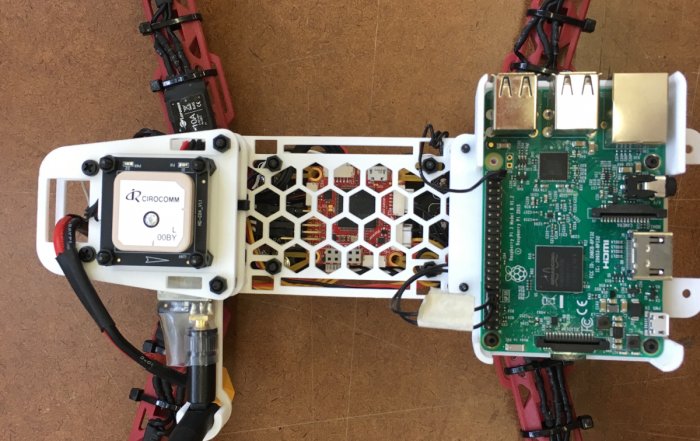
Video: Alan’s Adventure
This is a short video documenting our recent progress on aerial manipulation. We used PX4, ROS and Optitrack to achieve autonomous perching using a simple quadrotor. https://youtu.be/XjAHYiE-JD4
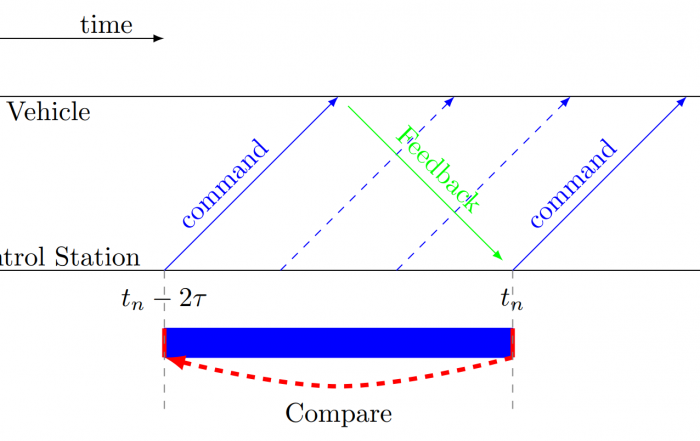
Adapting UAV Control for Latency
This article discusses my undergraduate thesis project, working on flying drones with latency
PX4 Research Log [13] – PX4 Off-board Control with MAVROS (2)
In the last tutorial we have set up the ROS environment to use MAVROS to talk to PX4. In this tutorial we will run a small example program to autonomously hover a simulated vehicle. Simulation
PX4 Research Log [12] – PX4 Off-board Control with MAVROS (1)
Companion computer is a very efficient way to control your PX4 vehicle in off-board mode. We have tested various methods and we have concluded Robot Operating System (ROS) is the best way. Here is a
PX4 Research Log [11] – Adding a new flight mode (create application)
In the last post we have set up the PX4 source code for our new flight mode, the flip mode. In this post I will continue finishing the flip mode by creating a new application
How to set up an ARM cross-compiler toolchain for macOS
Here’s how to create your own, shiny ARM gcc cross-compile toolchain for your Mac.
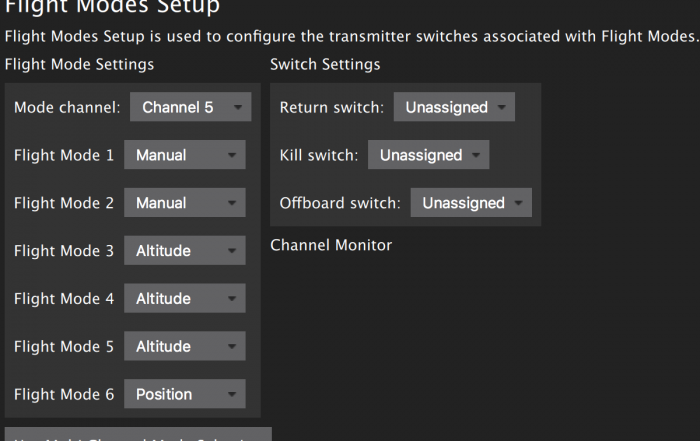
PX4 Research Log [10] – Adding a new flight mode (Preparation)
If you have programmed Ardupilot and now you switch to PX4, you would really appreciate how easy it is to implement a new flight mode in Ardupilot... PX4 is really good if you just want
Hardware tutorials

An Introduction to Building Your First Quadrotor
This article gives some useful tips and addresses some common issues found when building your first quadrotor.

Building a Tailsitter UAV
Tail sitters are pretty much the coolest flying machine ever, who wouldn’t want to fly like superman?

Resources
Here is a list of good links to find information about various topics related to UAV work: