PX4 Research Log [5] – Multicopter software in the loop simulation on Ubuntu
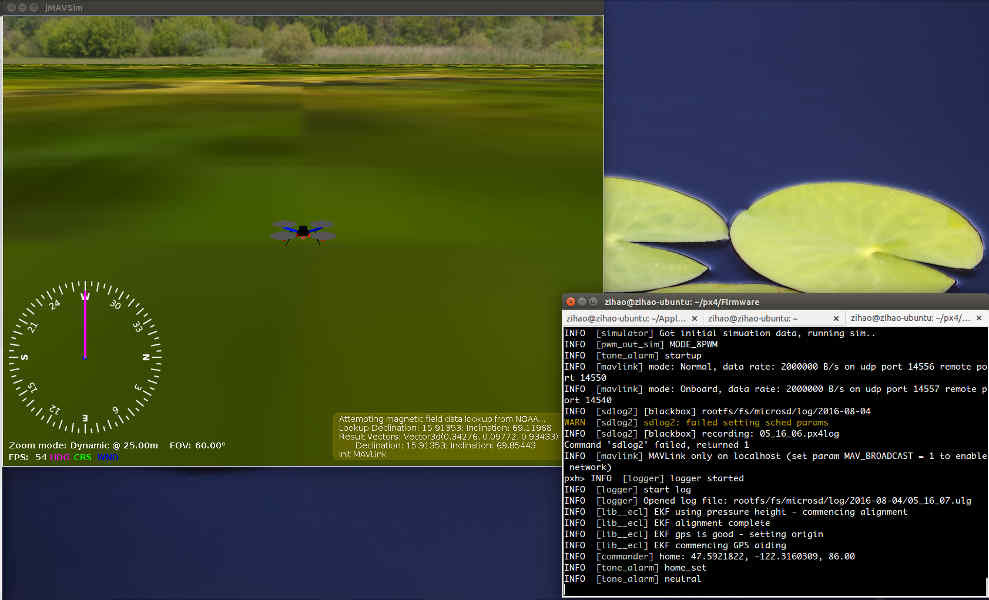
Testing development code on a flying platform is always risky, one small bug in the code could cause your beloved airframe go straight into the bin. To avoid that, always check your code stability in simulation. And the PX4 Software In the Loop (SIL) simulation is the perfect solution. SIL uses your computer hardware to