PX4 Research Log [9] – Analyzing flight on Ubuntu
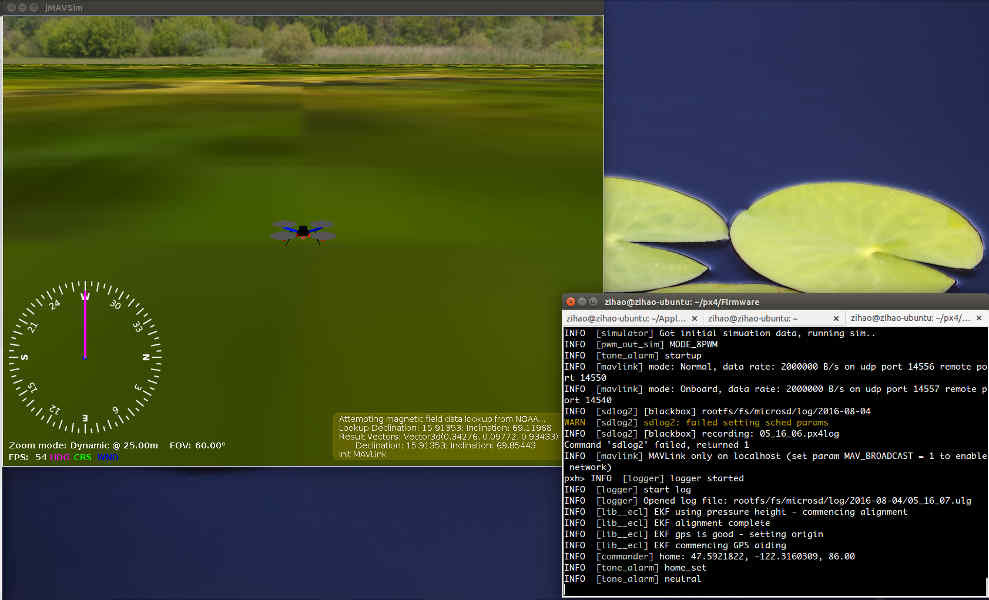
There are two ways to analyze your PX4 flight as I know, the ".px4log" file generated by PX4, and the ".mavlink" file generated by QGroundControl. 1. ".px4log" with FlightPlot The ".px4log" format is the log file format stored onto the SD card by PX4. The application that performs this logging is "sdlog2". The log files